
De onderzoekers toonden aan dat de wijnstokrobot veilig en stabiel een verscheidenheid aan zware en kwetsbare voorwerpen kan tillen, zoals een watermeloen. Afbeelding tegoed: met dank aan de onderzoekers
Door Jennifer Chu
In de tuinbouwwereld zijn sommige wijnstokken bijzonder grijpbaar. Terwijl ze groeien, kunnen de houtachtige ranken zich met voldoende kracht om obstakels heen wikkelen om hele hekken en bomen omver te trekken.
Geïnspireerd door de kronkelige vasthoudendheid van wijnstokken hebben ingenieurs van MIT en Stanford University een robotgrijper ontwikkeld die rond kan slingeren en een verscheidenheid aan voorwerpen kan optillen, waaronder een glazen vaas en een watermeloen, wat een zachtere aanpak biedt vergeleken met conventionele grijperontwerpen. Een grotere versie van de robo-ranken kan ook een mens veilig uit bed tillen.
De nieuwe bot bestaat uit een onder druk staande doos, geplaatst in de buurt van het doelobject, waaruit lange, wijnstokachtige buizen opblazen en groeien, zoals sokken die binnenstebuiten worden gekeerd. Terwijl ze zich uitstrekken, draaien en kronkelen de wijnstokken rond het object voordat ze teruggaan naar de doos, waar ze automatisch op hun plaats worden geklemd en mechanisch weer omhoog worden gewikkeld om het object voorzichtig op te tillen in een zachte, slingerachtige greep.
De onderzoekers toonden aan dat de wijnstokrobot een verscheidenheid aan zware en kwetsbare voorwerpen veilig en stabiel kan tillen. De robot kan zich ook door krappe ruimtes wurmen en zich door rommel heen duwen om een gewenst object te bereiken en vast te pakken.
Het team voorziet dat dit type robotgrijper in een breed scala aan scenario’s kan worden gebruikt, van landbouwoogsten tot het laden en lossen van zware vrachten. Op korte termijn onderzoekt de groep toepassingen in de ouderenzorg, waar zachte opblaasbare robotstokken kunnen helpen iemand voorzichtig uit bed te tillen.
“Iemand uit bed halen is een van de fysiek meest inspannende taken die een zorgverlener moet uitvoeren”, zegt Kentaro Barhydt, promovendus bij de afdeling Werktuigbouwkunde van het MIT. “Dit soort robots kan de zorgverlener helpen ontlasten, en kan zachter en comfortabeler zijn voor de patiënt.”
Barhydt presenteert samen met zijn co-eerste auteur van Stanford, O. Godson Osele, en hun collega’s het nieuwe robotontwerp in het tijdschrift Science Advances. De co-auteurs van de studie zijn Harry Asada, de Ford Professor of Engineering aan het MIT, en Allison Okamura, de Richard W. Weiland Professor of Engineering aan de Stanford University, samen met Sreela Kodali en Cosmia du Pasquier aan de Stanford University, en voormalig MIT-afgestudeerde student Chase Hartquist, nu aan de Universiteit van Florida, Gainesville.
Open en gesloten
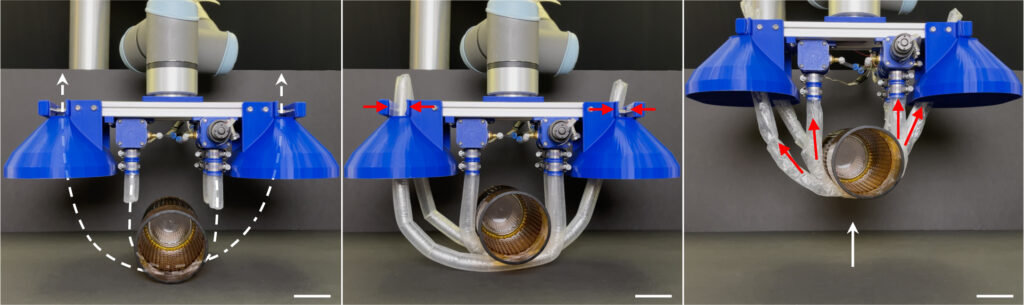 Terwijl ze zich uitstrekken, draaien en kronkelen de wijnstokken rond het object voordat ze teruggaan naar de doos, waar ze automatisch op hun plaats worden geklemd en mechanisch weer omhoog worden gewikkeld om het object voorzichtig op te tillen in een zachte, slingerachtige greep. Afbeelding tegoed: met dank aan de onderzoekers.
Terwijl ze zich uitstrekken, draaien en kronkelen de wijnstokken rond het object voordat ze teruggaan naar de doos, waar ze automatisch op hun plaats worden geklemd en mechanisch weer omhoog worden gewikkeld om het object voorzichtig op te tillen in een zachte, slingerachtige greep. Afbeelding tegoed: met dank aan de onderzoekers.
De Stanford-medewerkers van het team, onder leiding van Okamura, waren een pionier in de ontwikkeling van zachte, op wijnranken geïnspireerde robots die vanuit hun uiteinden naar buiten groeien. Deze ontwerpen zijn grotendeels opgebouwd uit dunne maar stevige pneumatische buizen die groeien en opblazen met gecontroleerde luchtdruk. Terwijl ze groeien, kunnen de buizen zich een weg banen door de omgeving, en zich door krappe en rommelige ruimtes wurmen.
Onderzoekers hebben vooral wijnstokrobots onderzocht voor gebruik bij veiligheidsinspecties en zoek- en reddingsoperaties. Maar bij MIT vroegen Barhydt en Asada, wiens groep robothulpmiddelen voor ouderen heeft ontwikkeld, zich af of dergelijke op wijnranken geïnspireerde robots bepaalde uitdagingen in de ouderenzorg zouden kunnen aanpakken – met name de uitdaging om iemand veilig uit bed te tillen. In verpleeg- en revalidatieomgevingen wordt dit overdrachtsproces vaak uitgevoerd met een patiëntenlift, bediend door een verzorger die een patiënt eerst fysiek op zijn zij moet verplaatsen en vervolgens weer terug op een hangmatachtig laken. De verzorger bindt het laken om de patiënt heen en haakt het aan de mechanische lift, die de patiënt vervolgens voorzichtig uit bed kan hijsen, vergelijkbaar met het ophangen van een hangmat of draagdoek.
Het team van MIT en Stanford stelde zich voor dat als alternatief een wijnstokachtige robot zachtjes onder en rond een patiënt zou kunnen slingeren om zijn eigen soort slinger te creëren, zonder dat een verzorger de patiënt fysiek hoeft te manoeuvreren. Maar om de slinger op te tillen, realiseerden de onderzoekers zich dat ze een element moesten toevoegen dat ontbrak in bestaande ontwerpen van wijnstokrobots: in wezen zouden ze de lus moeten sluiten.
De meeste op wijnstokken geïnspireerde robots zijn ontworpen als ‘open-loop’-systemen, wat betekent dat ze fungeren als snaren met een open uiteinde die zich in verschillende configuraties kunnen uitstrekken en buigen, maar ze zijn niet ontworpen om zichzelf ergens aan vast te maken om een gesloten lus te vormen. Als een wijnstokrobot zo kon worden getransformeerd van een open lus naar een gesloten lus, vermoedde Barhydt dat hij van zichzelf een slinger rond het object zou kunnen maken en zichzelf omhoog zou kunnen trekken, samen met wat of wie dan ook.
Voor hun nieuwe onderzoek schetsen Barhydt, Osele en hun collega’s het ontwerp voor een nieuwe op wijnranken geïnspireerde robotgrijper die zowel open als gesloten lusacties combineert. In een open-lusconfiguratie kan een robotplant rond een object groeien en draaien om een stevige greep te creëren. Hij kan zich zelfs ingraven onder een mens die op een bed ligt. Zodra er een greep is gedaan, kan de liaan teruggroeien naar en zich hechten aan de bron, waardoor een gesloten lus ontstaat die vervolgens kan worden teruggetrokken om het object terug te halen.
“Mensen gaan er misschien van uit dat je, om iets te pakken, gewoon je hand hoeft uit te steken en het te pakken”, zegt Barhydt. “Maar er zijn verschillende fasen, zoals positionering en vasthouden. Door te transformeren tussen open en gesloten lussen kunnen we nieuwe prestatieniveaus bereiken door de voordelen van beide vormen voor hun respectievelijke fasen te benutten.”
Zachte vering
Als demonstratie van hun nieuwe open- en gesloten-lusconcept bouwde het team een grootschalig robotsysteem dat is ontworpen om een persoon veilig uit bed te tillen. Het systeem bestaat uit een set onder druk staande dozen die aan beide uiteinden van een bovenliggende stang zijn bevestigd. Een luchtpomp in de dozen blaast langzaam dunne, wijnstokachtige buizen op en ontvouwt deze die zich uitstrekken naar het hoofd- en voeteneinde van een bed. De luchtdruk kan worden geregeld om de buizen voorzichtig onder en rond een persoon te bewegen, voordat ze zich weer naar hun respectievelijke boxen uitstrekken. De wijnstokken worden vervolgens door een klemmechanisme geleid dat de wijnstokken aan elke doos bevestigt. Een lier wikkelt de wijnstokken weer omhoog richting de kisten, waarbij de persoon voorzichtig wordt opgetild.
“Zware maar kwetsbare objecten, zoals een menselijk lichaam, zijn moeilijk vast te pakken met de robothanden die tegenwoordig beschikbaar zijn”, zegt Asada. “We hebben een op een wijnstok lijkende, groeiende robotgrijper ontwikkeld die zich om een voorwerp kan wikkelen en het voorzichtig en veilig kan ophangen.”
“Er is een hele ontwerpruimte waarvan we hopen dat dit werk onze collega’s inspireert om te blijven verkennen”, zegt co-hoofdauteur Osele. “Ik kijk vooral uit naar de implicaties voor toepassingen voor patiëntenoverdracht in de gezondheidszorg.”
“Ik ben erg enthousiast over toekomstig werk om robots als deze te gebruiken voor het fysiek assisteren van mensen met mobiliteitsproblemen”, voegt co-auteur Okamura toe. “Zachte robots kunnen relatief veilig, goedkoop en optimaal ontworpen zijn voor specifieke menselijke behoeften, in tegenstelling tot andere benaderingen zoals humanoïde robots.”
Hoewel het ontwerp van het team werd ingegeven door uitdagingen in de ouderenzorg, realiseerden de onderzoekers zich dat het nieuwe ontwerp ook kon worden aangepast om andere grijptaken uit te voeren. Naast hun grootschalige systeem hebben ze een kleinere versie gebouwd die aan een commerciële robotarm kan worden bevestigd. Met deze versie heeft het team laten zien dat de wijnstokrobot een verscheidenheid aan zware en kwetsbare voorwerpen kan vastpakken en optillen, waaronder een watermeloen, een glazen vaas, een ketelbel, een stapel metalen staven en een speelbal. De wijnstokken kunnen ook door een rommelige bak slingeren om er een gewenst voorwerp uit te halen.
“Wij denken dat dit soort robotontwerp voor veel toepassingen kan worden aangepast”, zegt Barhydt. “We denken er ook aan om dit toe te passen op de zware industrie, en op zaken als het automatiseren van de bediening van kranen in havens en magazijnen.”
Dit werk werd gedeeltelijk ondersteund door de National Science Foundation en de Ford Foundation.

MIT-nieuws


{kind=link}